
Raspberry Pi
The worlds most popular micro computer.
The raspberry pi is the brain of our boats, this tiny computer runs a version of debian and our own software to pilot our boats.
Student led robotic sailing team from Aberystwyth, Wales.
proudly Open source .
Originally started by a small group of first year undergraduates in 2012, we are a team of students building autonomous sailing robots at Aberystwyth University to compete in the International Robotic Sailing Regatta and the World Robotic Sailing Championships
You can help support us by sponsoring us £5 or £10 per month on Patreon. For larger and/or one off donations please see our contact links at the bottom of this page.
Built with love, epoxy, and trial and error

Dewi'r Ddraig is our original robot, a 1.3 metre long MaxiMOOP hull with a 2 metre sail, weighing in at 27KG.
The architecture of our control system is heavily designed for flexibility and code sharing between boats, and is made of a few key components

The worlds most popular micro computer.
The raspberry pi is the brain of our boats, this tiny computer runs a version of debian and our own software to pilot our boats.
Powerful language for powerful software.
Most of our high level software is written in python, a powerful high level language that lets us write clean and portable programs.
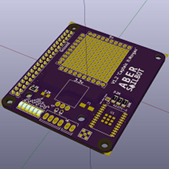
Open and Custom designed hardware.
In order to improve reliabilty we make a lot of our own electronics, Of course all of our designs and free and open for anyone to use.
A robotic sailing boat daemon
Boatd is the manager for a boat control system, more below...
Boatd is designed to create a clean separation between the
decisions the boat makes, and the lower level hardware actions.
This allows the behaviours easy to share between different boats,
and easier to test on simulated boats. It centralises the
components of a control systems that are common across sailing
boats and the various tasks they are required to complete. This
includes things such as logging, telemetry and behaviour
management.
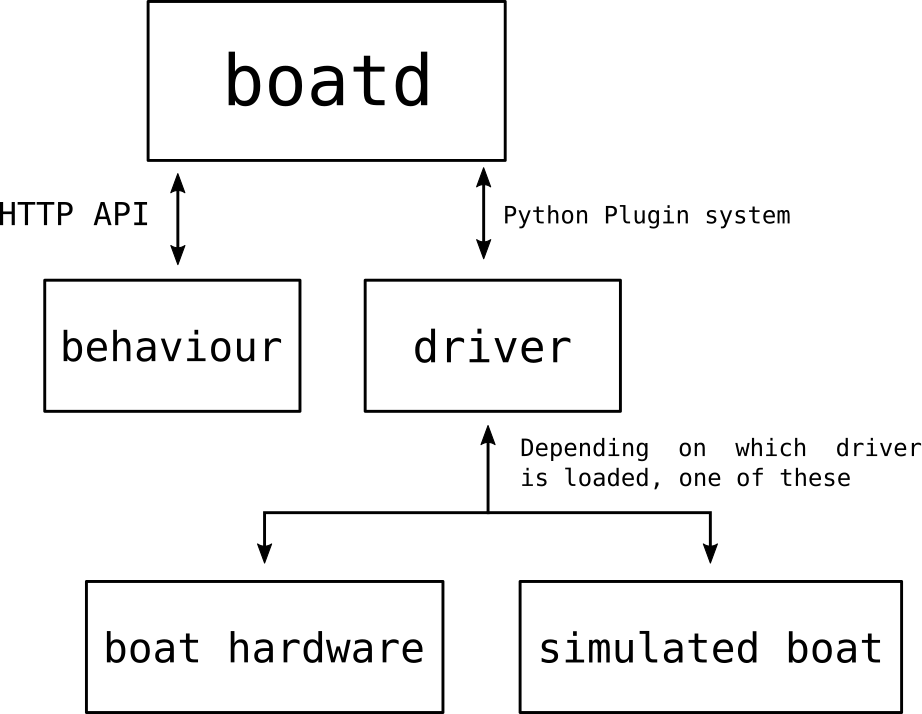 The
architecture of boatd is simple. A central daemon
exposes a restful API (HTTP + JSON), which can then be
controlled from any programming language.
The
architecture of boatd is simple. A central daemon
exposes a restful API (HTTP + JSON), which can then be
controlled from any programming language.
Boatd can be extended with plugins. Currently, plugins allow boatd users to monitor boats over the MAVLINK protocol, log GPX files and more.
If you would like to use boatd on your robot boat, feel free, it would be great to collaborate
See the boatd docs for further information: boatd.readthedocs.io
There are 2 robotic sailing competitions held annually, Sailbot and WRSC
The International Robotic Sailing Regatta (known as Sailbot), is an annual competition historically held in North America, where college and university teams must build and program an autonomous sailing boat to compete in a range of challenges with limited, if any, human interaction to control the boat.
WRSC, the World Robotic Sailing Championships, is an annual competition hosted by institutions across the globe. A few years ago it was even hosted by Aberystwyth. WRSC is usually a larger scale event than Sailbot, but with similar challenges and rules. With both student and staff categories, as well as varying sizes and a motor boat class, the competition’s range is expanding year on year. WRSC presents a whole range of new challenges for which we must cater.
Over the years we have been running, we have only been able to continue due to the support from sponsors and donors. We would like to thank the following for making AberSailbot possible:
We always look forward to any support offered by companies and individuals